郑 文
研究员 | 博士生导师
研究员 | 博士生导师
下一代人工智能研究方向具有极大的发展前景和应用价值。本研究起点为以图搜图,探究图像检索和识别领域中的关键技术。通过借鉴Milvus向量数据库的思想,研究如何高效地管理和检索大规模向量数据集,提高图像检索的速度和准确性。
随着城市化进程的不断加速,下一代人工智能建设已成为社会发展的重要趋势。研究方向逐渐向下一代人工智能靠近,探讨如何利用各种智能应用来提高城市管理和生活的质量。作为其中的一种关键应用,搜索引擎能够帮助人们快速找到所需的信息和资源,提高生活和工作效率。在下一代人工智能中,以图搜图技术可以帮助人们快速找到所需的图片、视频等资源,具有广泛应用前景。
目前,主要研究方向是图像识别和目标检测。图像识别指通过计算机算法来识别图像中的物体、场景、人物等信息,是计算机视觉领域的重要问题。图像识别广泛应用于人脸识别、自动驾驶、医疗影像分析等领域。目标检测则是在图像中定位和识别多个目标,也是计算机视觉领域的重要问题。其广泛应用于安防监控、智能家居、机器人等领域。研究方向可以为这些应用提供技术支持,推动其发展和应用。

通过研究图像识别、目标检测等问题,借鉴milvus向量数据库的思想,将研究方向向下一代人工智能靠近,相信可以为下一代人工智能的发展和应用做出重要的贡献。
智能医学工程是指以现代医学与生物学理论为基础,融合先进的大数据、云计算、机器学习等人工智能及相关领域工程技术,研究人的生命和疾病现象的本质及其规律,探索人机协同的智能化诊疗方法和临床应用的新兴交叉学科。其研究内容包括医学影像识别、智能健康数据管理等。旨在建立一个跨学科、多元化的教学和科研平台,促进各学科交叉融合,进而培养出适应时代发展的综合性高素质人才。
研究所与长治医学院,山西白求恩医院展开合作,主要研究方向有妊娠糖尿病,慢性病,老年病,间质性肺病等,并与长治医学院共建“精准诊断医学大数据分析与应用山西省重点实验室(筹)。研究所已掌握多种人工智能领域算法,在医疗上,能对疾病进行预测与高危因素挖掘,对CT影像进行分割,识别,伪彩。与长治医学院与山西白求恩医院合作,将人工智能领域相关算法真正用到实际临床当中,共同推进智慧医疗。

复杂系统 complex system由许多相互作用的元素组成。复杂系统的例子无处不在:全球气候、有机体、人脑、电网、交通、通讯系统等基础设施网络、城市社会和经济组织网络、生态系统、活细胞、甚至整个宇宙,这些都可以看作是复杂系统。复杂系统这一术语,通常是指对复杂系统的研究,表示一种新的科学研究方法。主要研究:系统元素之间的关系如何产生集体行为,系统和环境之间如何进行相互作用,将集体、系统层面的行为作为研究的基本对象。因此,复杂系统可以看作是还原论 reductionism的替代范式,主要解释系统的组成部分和相互关系。
复杂系统是指那些本身难以直接建模的系统,因为系统组成元素之间以及系统和环境之间存在依赖、竞争、关联等复杂的相互作用。系统之所以“复杂”,是因为在这些相互作用中会产生如非线性 nonlinearity、涌现 emergence、自发秩序 spontaneous order 、适应性 adaptation以及反馈回路 feedback loops等特殊性质。因为这些系统出现在不同领域,所以对不同领域系统的共性研究慢慢发展成为一个独立的研究领域。大部分情况下,复杂系统都可以表示成一个网络,网络中的节点表示元素,连边表示相互作用。
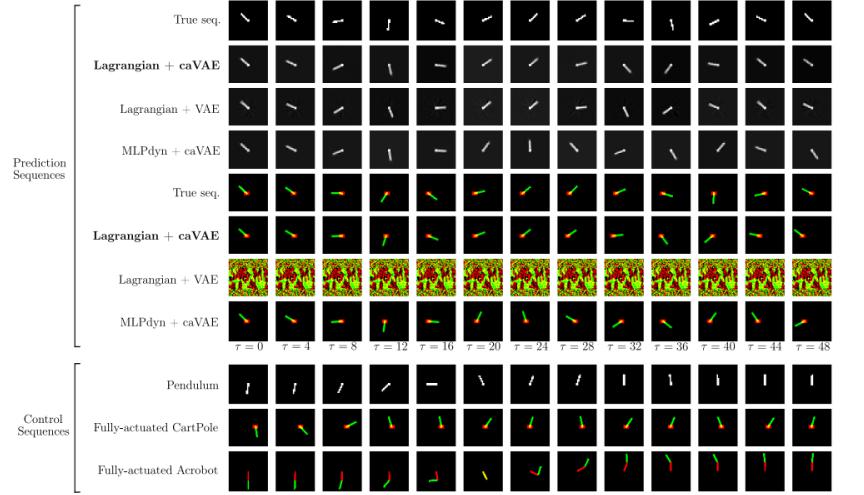
随着人工智能的快速发展,深度学习在各种科学问题的研究中取得了优秀的成果,因而物理科学的各个领域已经将深度学习作为处理困难的科学问题的有力工具。研究所的主要研究方向之一是复杂性科学与人工智能理论,将人工智能方法应用到传统学科上,来进行复杂的分类任务,处理及应用庞大的数据集,推断未观测到的现象,甚至发现复杂现象的物理原理。
智能控制基于UWB高精定位设备,获取节点之间的距离,先后经过卡尔曼滤波、三边定位、分布式动态追踪等算法实现对车辆的精准控制。
UWB
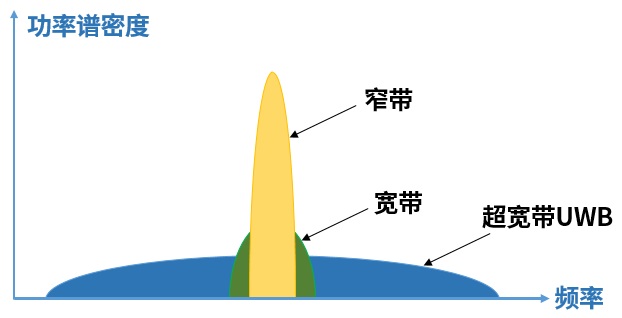
UWB(Ultra Wide Band)技术是一种无线载波通信技术,它不采用正弦载波,而是通过发送和接收具有纳秒或微秒级以下的极窄脉冲来实现无线传输的。使用的带宽在500MHz以上。通过超大带宽和低发射功率,实现低功耗水平上的快速数据传输。
UWB具有抗干扰性能强、传输速率高、带宽极宽、消耗电能小、发送功率小等诸多优势,主要应用于室内通信、家庭网络、位置测定、雷达检测等领域。系统容量大发送功率非常小,其电磁波辐射对人体的影响也会很小,应用面广泛。
卡尔曼滤波
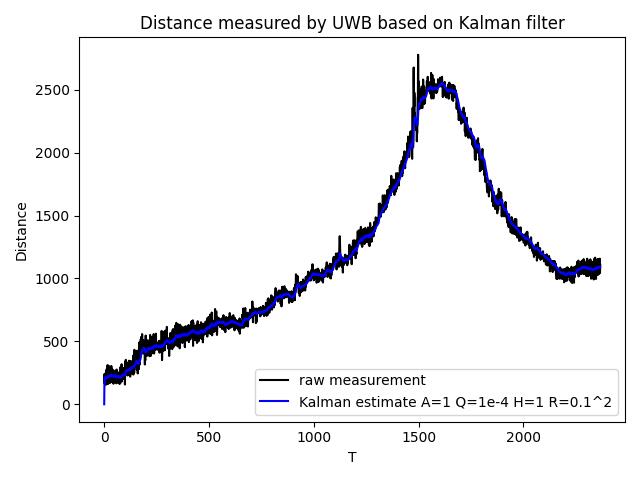
Kalman Filter是一个高效的递归滤波器,它可以实现从一系列的噪声测量中,估计动态系统的状态。广泛应用于包含Radar、计算机视觉等在内的工程应用领域,在控制理论和控制系统工程中也是一个非常重要的课题。
1960年卡尔曼发表了用递归方法解决离散数据线性滤波问题的论文《A New Approach to Linear Filtering and Prediction Problems》,在这篇文章里一种克服了维纳滤波缺点的新方法被提出来,这就是我们今天称之为卡尔曼滤波的方法。卡尔曼滤波应用广泛且功能强大,它可以估计信号的过去和当前状态,甚至在即使并不知道模型的确切性质时,也能估计将来的状态。
其基本思想是以最小均方误差为最佳估计准则,采用利用前一时刻信号与噪声的状态空间模型获取的估计值和当前时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值。算法根据建立的系统方程和观测方程对需要处理的信号做出满足最小均方误差的估计。
对于解决很大部分的问题,它是最优、效率最高甚至是最有用的。它的应用十分广泛包括机器人导航、控制、传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别、图像分割、图像边缘检测等等。
三边定位
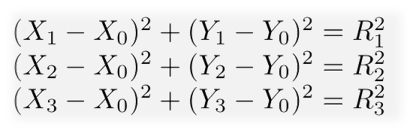
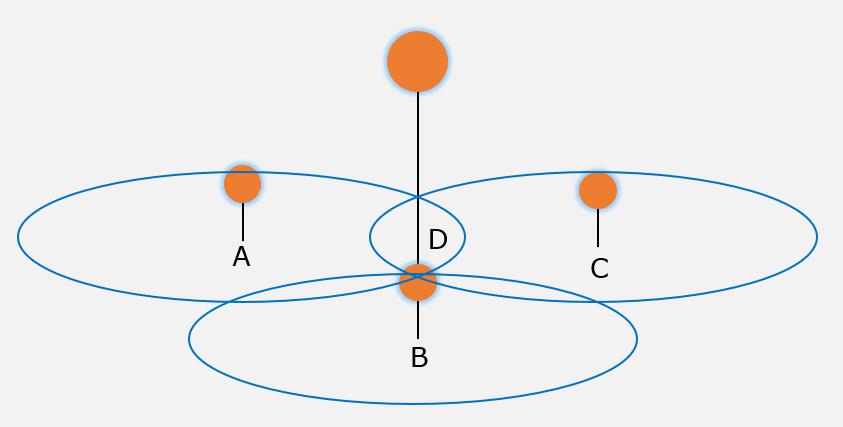
平面上有三个不共线的基站 A,B,C,和一个未知终端 D,并已测出三个基站到终端D的距离分别为R1,R2,R3,则以三个基站坐标为圆心,三基站到未知终端距离为半径可以画出三个相交的圆,如图图所示,未知节点坐标即为三圆相交点
1.已知三点位置 (x1, y1), (x2, y2), (x3, y3)
2.已知未知点 (x0, y0) 到三点距离 R1, R2, R3
3.求解方程组可得(x0, y0)
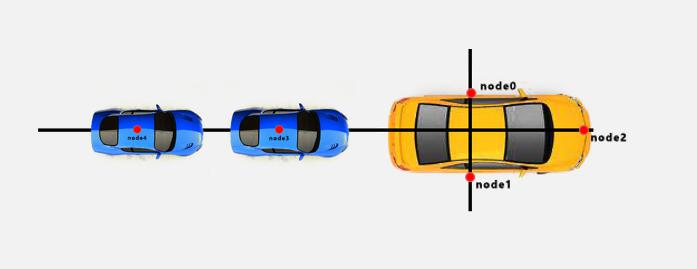
分布式动态追踪
基于DR模式动态追踪方法在头车固定三个Node节点形成稳定坐标系。整个车队后车的坐标都基于该坐标系来计算求得。在实际行进中由于头车也是运动的,因此坐标系与后车的位置关系是相对的。故为后车设置目标点来追赶,当后车的实际位置与目标位置不同时,头车将发出指令控制后车动作。

所长:郑文